


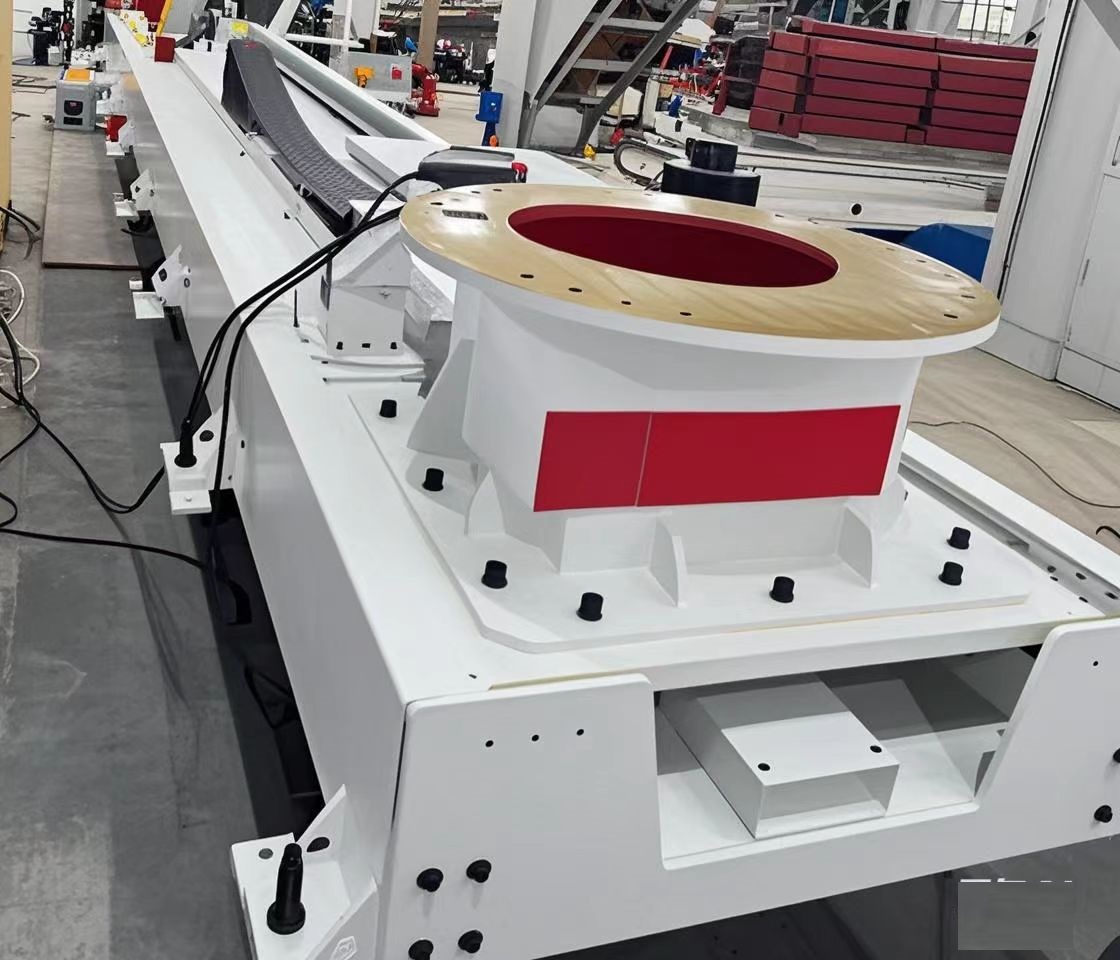
XYZ三軸龍門,XZ軸架設于兩條平等移動的Y軸上,工作范圍為XYZ平面;Z軸本體固定于X軸滑座,Z軸滑座上下移動;雙Y軸用連動桿實現單驅動;適用水平面內三維工件搬運,移載,行走軌跡等應用。
更多





機器人外部軸一般由執行機構、驅動裝置、檢測裝置和控制系統和復雜機械等組成。即機器人本體,其臂部一般采用空間開鏈連桿機構,其中的運動副(轉動副或移動副)常稱為關節,關節個數通常即為機器人的自由度數。
更多



機器人外部軸一般由執行機構、驅動裝置、檢測裝置和控制系統和復雜機械等組成。即機器人本體,其臂部一般采用空間開鏈連桿機構,其中的運動副(轉動副或移動副)常稱為關節,關節個數通常即為機器人的自由度數。
更多
推廣焊接和切割自動化相關技術。
? 24小時內回復
? 現場調試
? 售后服務人員提供周到服務
? 官方網站: www.maikew.cn
Copyright ? 2024 新寶機器人科技(南通)有限公司 All Rights Reserved | 蘇ICP備19061139號

